PUMA 500 Robot Arm
This is a page that I'm working on to share information on the PUMA robot arm. The PUMA was made in the early 1980's and is still used quite a bit as an educational robot. The PUMA uses a programming language called VAL whis is a series of simple commands that can be stored as a program in it's internal memory, or sent to it via the serial interface.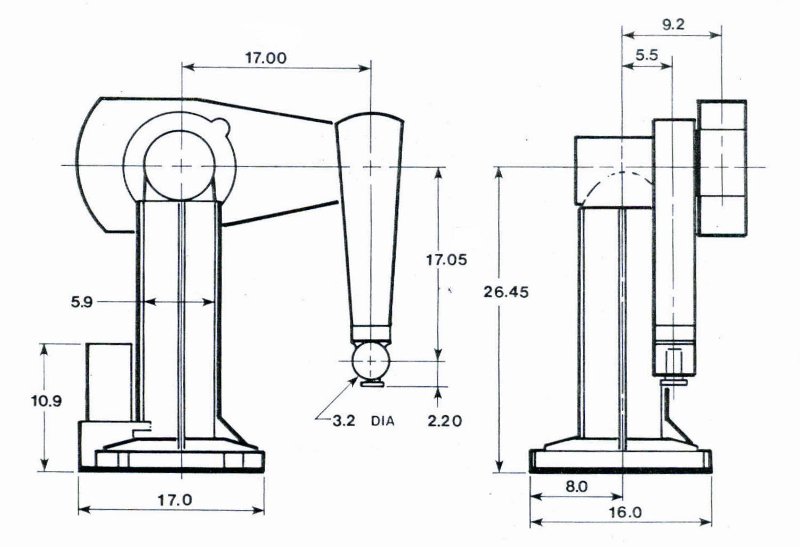
It's a fairly large machine for your typical garage workshop... but small by industrial standards. The controller is a rack mount type enclosure that weighs about 80 pounds or so... mostly the large power supplies that are needed to run the 6 motors in the arm plus all the electronics in the controller. The controller is connected to the arm by a 12 foot long, 1 inch diameter unmilical with a large clunky connector.
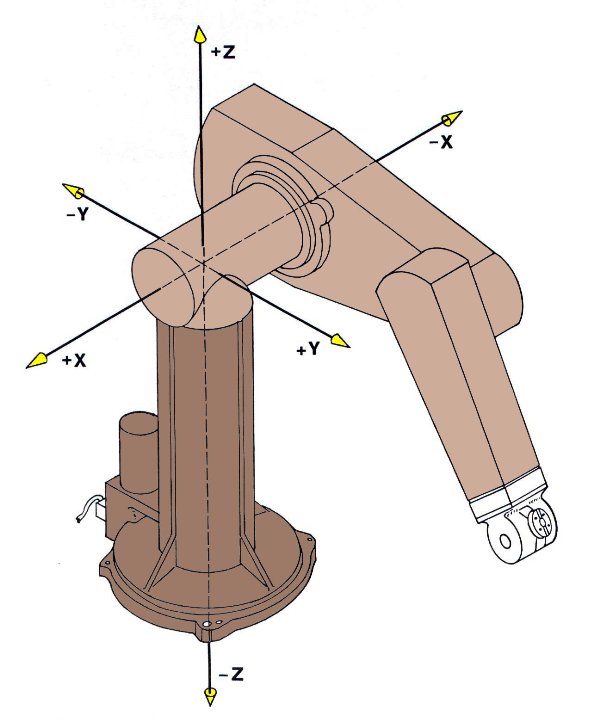
Coordinates
are set up around the base as shown above, when you set the teach
pendant (hand unit) to WORLD mode, the arm will do it's best to move
the tool (gripper) in a straight line according to these coordinates.
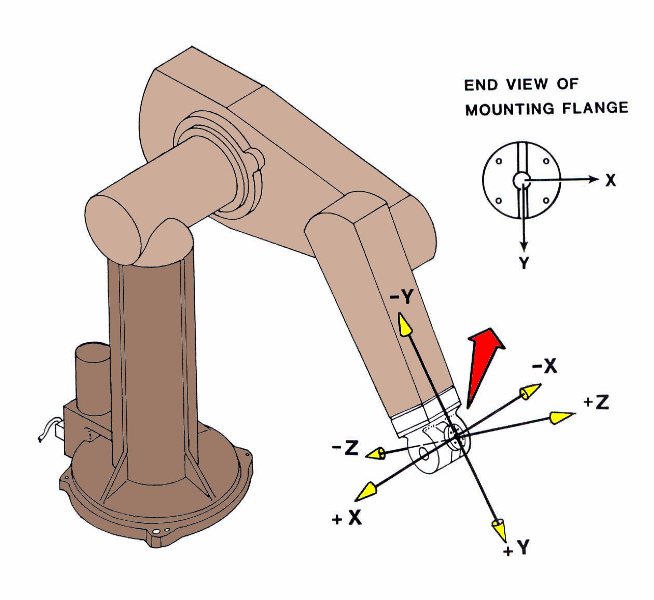
If
you switch to TOOL mode, the unit will base it's actions on the tool
(gripper) as shown above. You can supply a tool offset where you
specify the length of the tool and it will change the point of rotaion
to this new offset. This can be useful in manipulating objects where
you want the reference to be the tip of the gripper instead of the
mounting flange as shown above.
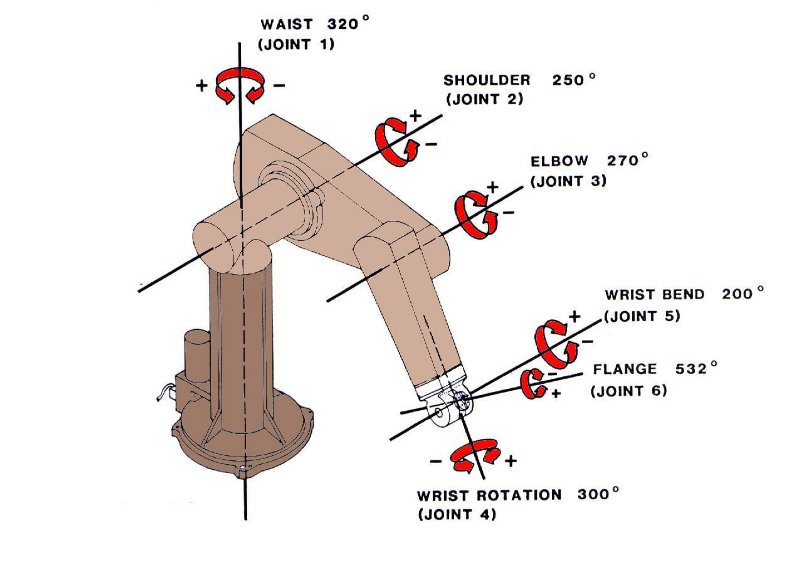
This
shows the physical limits of the design, and just how far each joint is
able to move. None of the joints are continous rotation as the
electrical wires run throughout the arm. Internally there is a gear
system to actually move the joints. The forearm contains the three
motors to move the gripper section, the back section of the arm has two
motors, one to rotate the forearm and one to rotate the lower arm. The
final motor can be seen in the can at the base, this rotates the arm
through the320 degree range of motion.
I have scanned the programming manual and have it on this page in two formats... the first is a simple PDF that is about 5 meg, the second is larger... about 14 meg, but has the ability to search for keywords and such. They came from a scanned manual and I applied OCR... so the search may miss a word or two... but otherwise I think it's worth it to download the searchable version.
This was just a silly video I made in the workshop one night. Later I'll do some educational stuff... but for now I wanted you to see how it looks when it's in motion. The setup and programming for this took only 20 minutes, I did it in one take, and didn't bother to edit it. It's silly, but it shows how the robot can run a task without human intervention.
I have scanned the programming manual and have it on this page in two formats... the first is a simple PDF that is about 5 meg, the second is larger... about 14 meg, but has the ability to search for keywords and such. They came from a scanned manual and I applied OCR... so the search may miss a word or two... but otherwise I think it's worth it to download the searchable version.
VAL Programming
Manual - Users Guide to VAL 398H2A
Unofficial PUMA USER'S Guide - By Jerry Rutherford
Unofficial PUMA USER'S Guide - By Jerry Rutherford
USING
THE PUMA ROBOT - A quick start manual for the
novice robot user.
This was just a silly video I made in the workshop one night. Later I'll do some educational stuff... but for now I wanted you to see how it looks when it's in motion. The setup and programming for this took only 20 minutes, I did it in one take, and didn't bother to edit it. It's silly, but it shows how the robot can run a task without human intervention.